RTH (Return to Home)の動作を設定する
RTH (Return to Home)機能による機体の動作を設定することができます。
- 「Airpeak Flight」アプリホーム画面で、[飛行を始める]をタップする。フライト画面が表示されます。
- 画面右上の
 (設定)をタップする。
(設定)をタップする。 - 表示された設定メニューから[機体]をタップする。
- [動作]をタップする。
- [RTH開始時の高度]と[スマート障害物回避]の設定をする。
[RTH開始時の高度]
RTH (Return to Home)を開始するときの高度を設定します。高度の値はホームポイントからの相対高度です。
-
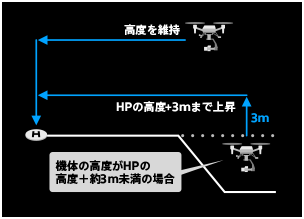
[飛行中の高度を維持]
機体は飛行中の高度を維持し、機首をホームポイントへ向けて帰還します。
機体の高度がホームポイントを基準に約3 m低い場合は、機体はホームポイントの高度から3 mまで上昇し、ホームポイントへ帰還します。
-
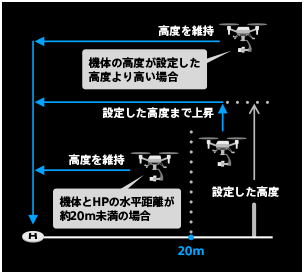
[指定した高度に移動]
機体のホームポイントからの水平距離が約20 m以上で、飛行中の高度が設定した高度よりも低い場合は、機体は設定した高度まで上昇し、機首をホームポイントへ向けて帰還します。設定できる高度は、ユーザー設定飛行空域の最大高度より10 m低い高度までです。飛行環境を確認し、経路上に障害物のない安全な高度を設定してください。
ただし、以下の条件でRTHを開始した場合は、機体は飛行中の高度を維持したままホームポイントへ帰還します。
- 機体のホームポイントからの水平距離が約20 m未満の場合
- 飛行中の高度が設定した高度より高い場合
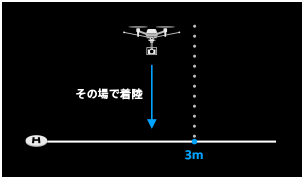
RTH開始時の高度の例外
RTH開始時の高度の設定に関わらず、機体のホームポイントからの水平距離が約3 m未満の場合は、機体は機首方向を変えずその場で着陸します。
[スマート障害物回避]
障害物を自動的に回避する機能です。障害物を回避する方法は2種類から選択できます。
-
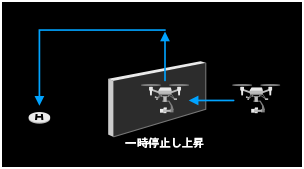
[ベーシック]
障害物を検知すると、機体が一時停止し、3 m上昇します。上昇して障害物を検知しなくなった場合は、その高度で水平方向に飛行します。上昇しても障害物を検知し続けている場合は、障害物を検知しなくなるまで上昇し続けます。
[ベーシック]は、森や住宅地などの周囲に障害物が多い環境や、高い障害物がない環境で、高度を上げると安全を確保できる場合に選択してください。[アドバンスト]よりもRTH (Return to Home)にかかる時間が長くなり、バッテリー消費が多くなる場合があります。
-
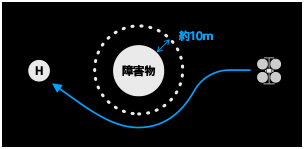
[アドバンスト]
障害物を検知すると、機体が効率の良い経路を自動的に選択し、上昇、または水平方向に移動します。機体は検知している障害物から10 m程度の距離を保って飛行します。
[アドバンスト]は、ビルや鉄塔などの高い障害物が想定される環境で、上昇して回避するより水平方向に移動して回避したい場合に選択してください。[ベーシック]よりもRTH (Return to Home)にかかる時間が短くなり、バッテリー消費が少なくなる場合があります。
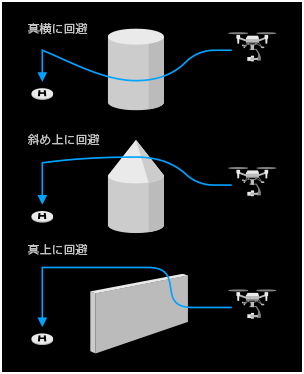
障害物の回避方法
-
ご注意
- [スマート障害物回避]機能はオペレーターの操作を補助するための機能であり、必ず障害物を避けられるものではありません。オペレーターは機体を注視して、衝突の危険がある場合には、送信機を操作して回避をしてください。
ヒント
- [スマート障害物回避]の設定は、RTH (Return to Home)の他に、タイムラインミッション、マッピングミッション、およびダイレクト再現飛行における準備飛行中の動作にも適用されます。
- [スマート障害物回避]を[ベーシック]に設定している場合、RTH (Return to Home)以外の飛行では、機体は障害物を回避しません。